智能草坪养护机器人不仅具备与人工相似的操作能力,而且在智能化方面更胜一筹。相较于人工除草,智能草坪养护机器人的识别错误率极低。这得益于其内部集成的先进算法和精密传感器,使其能够准确地区分草坪上的每一株植物,无论是目标草种还是杂草,都能被精确识别并处理。因此,在草坪养护工作中,智能草坪养护机器人不仅能...
智能草坪养护机器人基本参数
- 品牌
- 熙岳智能
- 型号
- 南京熙岳智能
- 加工定制
- 是
智能草坪养护机器人企业商机
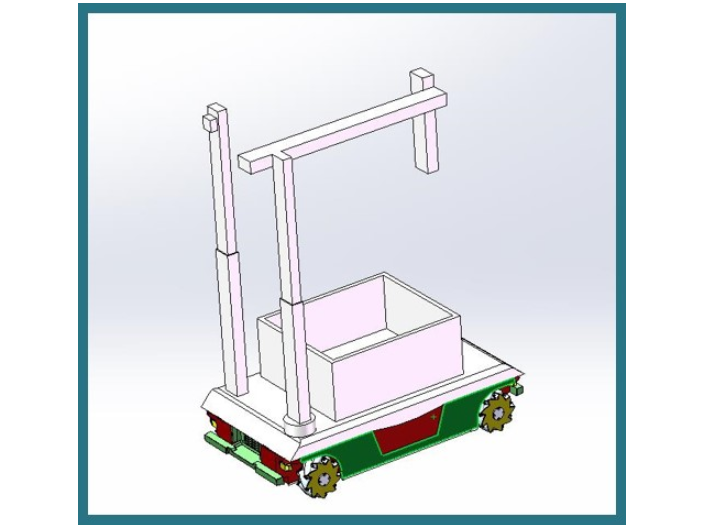
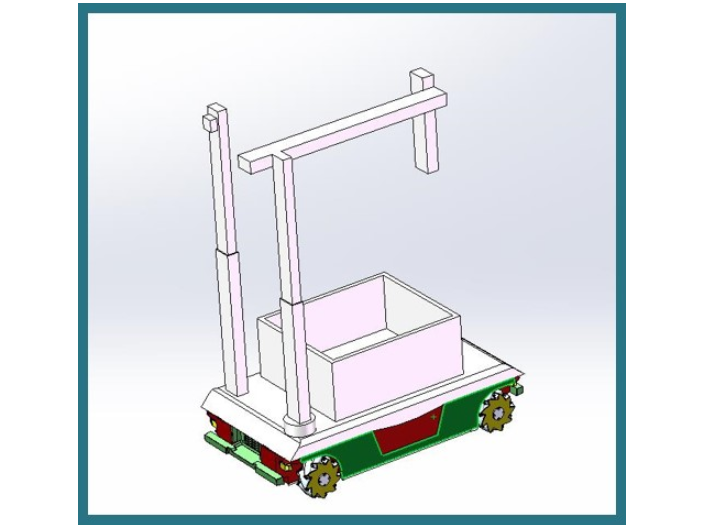
智能草坪养护机器人,包括四个车轮、四个第一步进电机、四个伺服电机、四个伸缩缸、铰接头、铰接座、四个电缸、底板、第二底板、转动架、四个机械臂、四个机械钳、齿轮、第二伺服电机、锥桶、粉碎组件、进料桶、叶片、第二步进电机,本发明具有以下优点:本发明使用球铰接、电缸来联接底板和第二底板,使本发明能够在坡道、低洼等恶劣地理环境下时刻保证机身的平衡,并起到良好的减震作用,使得本发明在各种地理环境下行走自如;采用四个的机械臂、机械钳进行拔草工作,效率高,自由度高,对于一些比较低矮和比较高大的杂草也能达到很好的除草效果;采用粉碎组件将杂草粉碎后吹出,碎杂草经过微生物分解会变成废料,从而更加节能环保。这个除草机比较大的一个亮点就是它的探头。可以识别作物和一般的杂草,从而将杂草去除干净。上海农业智能草坪养护机器人案例

熙岳智能草坪养护机器人怎么使用呢?1、预约工作功能:除草机器人可以在割草之前进行手动设置每天的工作时间,除草机器人会在设定的时间内自动出去割草,在设置的时间内自动回航充电,如果割草期间机器出现电池电量不足,除草机器人会自动回航充电,充完电之后继续去充电。2、防水功能:除草机器人有底盖,中盖,中盖和上盖三层结构,中盖和上盖双层防水,内部线路都进行了防水漆处理。而且可以进行泼水,水龙头直冲,无需防雨棚,可以直接保证除草机器人内部主板的正常运行。3、自动避雨功能:除草机器人尾部把手处设有个两个雨水感应铜片,下雨的时侯雨水滴落在铜头上,除草机器人可以自动感应,立即停止割草并回航充电。上海农业智能草坪养护机器人案例智能 除草机器人非常适合农场,它可以推进自动化和智能化 的发展进程。

智能草坪养护机器人的自动导航与汽车的自动驾驶场景并不完全相同。草坪上没有车道的概念,也没有信号灯等明确的标志帮助机器人获取语义信息进行定位。不同的草坪在面积和形状上有很大的差异,禁区的特点也不一样,这就意味着必须根据草坪的特点来构建视觉模型和导航算法,同时还要控制成本。这些都为割草机器人的发展设置了很多障碍。休息一下,在绿色的草坪上漫步;看着身边的孩子自由玩耍,奔跑,是每个人都向往的生活场景。但是,要让电脑的桌面画面成真并不容易。比较大的障碍在于,在人工操作或使用围栏割草机器人的现状下,草坪养护的质量和成本、草坪养护的效率和草坪的有效利用率无法同时优化。
近年来,随着城市绿化面积显著提高,公共绿地定时维护、修剪工作日益繁琐。为了提高作业效率,减少劳动力成本,传统手动割草机升级为全自动的智能割草机器人成为研究的热点问题。针对目前除草机器人采用的随机式或规划式除草方式,会造成重复率高、覆盖率低及清扫时间长等问题。对于智能除草机器人而言,以较低的重复率和较高的覆盖率完成工作区域的除草工作,需要研究全区域覆盖路径规划算法。全区域覆盖路径规划就是在除草机器人的工作环境中寻找到一条可以无碰撞行走,并且可将整个工作区域全部覆盖、重复行走路径尽可能少的道路,故路径规划在其底层决策中具有关键性作用,可直接影响除草机器人的工作效率和工作精度,同时简单稳定的路径规划算法会提高除草机器人性能,质量的路径规划算法能有效降低除草机器人的工作时间、能量消耗、及自身装备的磨损,开展除草机器人的路径规划研究具有重要意义。 除草工具可以自由地更改和调整:在机械手臂前端有通用接口,根据草场杂草实际情况,选择不同的除草工具。

熙岳做的智能草坪养护机器人的GPS民用定位精度为3m,若不用差分技术,则导致定位误差大,难以满足农业作业要求。计算机视觉导航技术成本低廉、能够更好地描述当前环境,更能反映当前信息,就是识别出机器行进的路线。因此,机器视觉导航的主要任务是从图像中识别作物行,并检测出轨迹路径,为确定机器的相对位置提供依据。为了提供一种喷施作业的通用机器人本体,笔者基于计算机视觉导航技术,设计一种能够自行导航并行走的机器人,在需求分析的基础上,对自动导航机器人进行总体设计,并搭建了机器人原型,重点研究了机器人田间自动导航系统(包括颜色模型选择、作物与土壤分割方法、导航路径和参数的自动检测),并进行性能测试,调试优化参数,以实现机器人的自动行间识别和导航。 机器人除草系统,其工作时完全不使用除草剂,而是以纯机械的方式消除杂草。上海农业智能草坪养护机器人案例
自动避雨 当下雨时,自动返回工作站处避雨。上海农业智能草坪养护机器人案例
熙岳做的智能草坪养护机器人的GPS民用定位精度为3m,若不用差分技术,则导致定位误差大,难以满足农业作业要求。计算机视觉导航技术成本低廉、能够更好地描述当前环境,更能反映当前信息,就是识别出机器行进的路线。因此,机器视觉导航的主要任务是从图像中识别作物行,并检测出轨迹路径,为确定机器的相对位置提供依据。为了提供一种喷施作业的通用机器人本体,笔者基于计算机视觉导航技术,设计一种能够自行导航并行走的机器人,在需求分析的基础上,对自动导航机器人进行总体设计,并搭建了机器人原型,重点研究了机器人田间自动导航系统(包括颜色模型选择、作物与土壤分割方法、导航路径和参数的自动检测),并进行性能测试,调试优化参数,以实现机器人的自动行间识别和导航。上海农业智能草坪养护机器人案例
与智能草坪养护机器人相关的文章

北京绿化带智能草坪养护机器人产品介绍
- 浙江养护智能草坪养护机器人服务价格 2025-01-08
- 浙江家庭智能草坪养护机器人公司 2024-12-30
- 养护智能草坪养护机器人 2024-12-21
- 河南学校智能草坪养护机器人按需定制 2024-12-09
- 浙江品质智能草坪养护机器人公司 2024-12-08
- 江苏节能智能草坪养护机器人产品介绍 2024-12-02
- 节能智能草坪养护机器人供应商 2024-11-29
- 浙江学校智能草坪养护机器人公司 2024-11-24
- 上海学校智能草坪养护机器人产品介绍 2024-11-14
- 制造智能草坪养护机器人品牌 2024-11-13
- 江苏草坪智能草坪养护机器人价格 2024-11-12
- 天津绿化带智能草坪养护机器人私人定做 2024-11-11
与智能草坪养护机器人相关的产品



与智能草坪养护机器人相关的新闻
-
江西学校智能草坪养护机器人供应商 2024-11-02 07:34:51智能草坪养护机器人在设计和制造过程中,不仅要满足基本的机器人性能要求,还要针对采摘作业对象的特点进行专门的考量。为了满足这一需求,工程师们致力于设计一种简单、紧凑且轻巧的机械手。这种机械手不仅结构简洁,易于维护,而且在采摘时能够保持高效且无损。通过精心的设计和优化,机械手在采摘过程中能够准确、快速地...
-
北京智能草坪养护机器人公司 2024-11-01 08:26:55智能草坪养护机器人的设计中,送料传送带、垃圾箱体和自动卸料机构是三个不可或缺的部分。送料传送带负责将养护材料如肥料、种子等准确地输送到工作区域,确保草坪得到均匀的养护。垃圾箱体则用来收集机器人处理过程中产生的废弃物,如修剪下来的草屑、杂草等,保持工作区域的整洁。而自动卸料机构则负责在机器人完成工作后...
-
吉林品质智能草坪养护机器人解决方案 2024-10-28 08:31:36智能草坪养护机器人在农场中的应用具有巨大的潜力和优势,它可以极大地推进自动化和智能化的发展进程。农场作为一个庞大的生产系统,对于草坪的养护需求十分迫切。而智能草坪养护机器人通过集成先进的机器视觉、路径规划和动作控制等技术,能够自主完成草坪的修剪、施肥、灌溉等多项任务,实现全过程的自动化和智能化。这不...
-
园艺智能草坪养护机器人制造价格 2024-10-17 08:12:11智能草坪养护机器人是一种集成了先进技术的自动化设备,其重要组成部分包括光源、相机、遮光罩和控制器。这些组件共同协作,使机器人能够高效地执行草坪养护任务。光源为相机提供足够的光线,确保在各种光线条件下都能捕捉到清晰的图像。相机则负责捕捉草坪的图像信息,为机器人的决策和动作提供数据支持。遮光罩的作用是减...
与智能草坪养护机器人相关的问题
与智能草坪养护机器人相关的标签
新闻资讯
产品推荐
-

江西生物视觉滴定仪产品介绍
2025-05-27 -

扬州智能瑕疵检测系统价格
2025-05-26 -
河南视觉检测图片
2025-05-26 -

一种智能采摘机器人产品介绍
2025-05-25 -

上海视觉检测仪
2025-05-25 -
浙江铅板定制机器视觉检测服务定制价格
2025-05-22 -
江苏榨菜包定制机器视觉检测服务用途
2025-05-22 -
扬州密封盖瑕疵检测系统按需定制
2025-05-19 -

山东冲网定制机器视觉检测服务处理方法
2025-05-18