- 品牌
- 宏智铭,升泰电气
- 型号
- 齐全
- 类型
- 报警装置,舵角指示器,音响信号器,转速表,传令钟
- 加工定制
- 是
航行信号灯控制箱的信号控制参数:
通道数量:根据船舶的大小和航行灯、信号灯的配置需求,控制箱的通道数量会有所不同。小型船舶的控制箱可能有十几个通道,大型船舶的则可能多达几十个甚至上百个通道。例如,有的控制箱有 26 路航行灯通道和 20 路信号灯通道。控制方式:包括手动控制和自动控制。手动控制可以通过控制面板上的按钮、开关等操作来单独控制每一路信号灯的开启、关闭和调光;自动控制则可以根据船舶的航行状态(如进出港、航行、停泊等)自动切换信号灯的状态。调光范围和精度:调光范围一般为 0% 至 100%,可以根据实际需求对信号灯的亮度进行调节。调光精度则表示在调节亮度时的较小调节幅度,例如可以精确到 1% 或更高的精度。闪光灯频率:对于需要设置闪光灯的信号灯,控制箱应能控制闪光灯的闪烁频率,一般在每分钟几十次到几百次不等,并且频率应可调节 无锡宏智铭科技致力于提供船用配电设备服务,有想法的不要错过哦!湖北船用配电系统
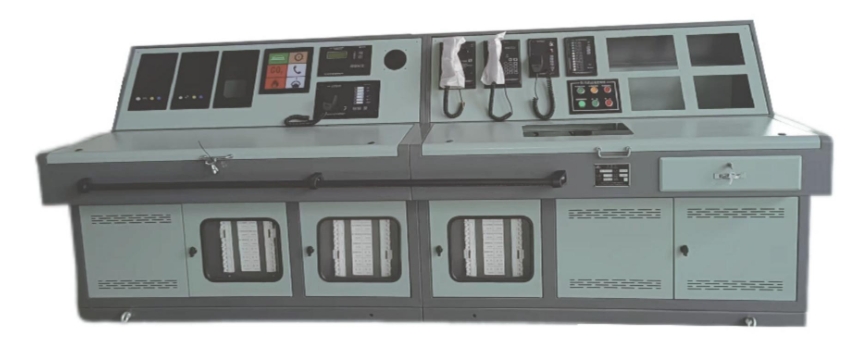
航行信号灯控制箱组成结构:
控制面板
这是船员操作的主要界面,上面有各个航行信号灯的控制按钮或开关,按钮上通常标有相应信号灯的名称或功能符号。此外,控制面板上还可能有亮度调节旋钮,用于调整信号灯的亮度,以适应不同的环境光条件。
继电器和接触器
这些电器元件用于实现对航行信号灯的电路控制。继电器能够通过小电流控制大电流电路,当控制面板上的按钮被按下时,继电器会动作,使相应信号灯的电路接通或断开。接触器则主要用于控制大功率的信号灯,保证电路的可靠通断。电源模块为航行信号灯提供稳定的电源。船舶上的电源系统比较复杂,可能有不同的电压等级,
电源模块
可以将船舶的主电源转换为适合航行信号灯使用的电压。例如,将 380V 或 440V 的船舶主电源转换为 24V 或 12V 的直流电源,为信号灯灯泡提供稳定的供电,防止电压波动对灯泡寿命和信号显示效果的影响。
保护装置
包括熔断器、断路器等。熔断器在电路发生过载或短路时,会因电流过大而熔断,从而切断电路,保护设备和线路免受损坏。断路器则可以手动或自动切断电路,当出现故障电流时,它能够快速跳闸,并且可以通过复位操作重新接通电路,在故障排除后方便船员恢复信号灯的正常工作。 湖北船用配电系统船用配电设备,就选无锡宏智铭科技,用户的信赖之选,有需求可以来电咨询!
船用组合起动器的特点
环境适应性防潮、盐雾防护:船舶在海洋环境中运行,空气湿度高且含有大量盐雾。船用组合起动器必须具有良好的防潮和抗盐雾能力,其外壳一般采用耐腐蚀的材料制成,内部元件也经过防潮处理,以防止因潮湿和盐雾腐蚀导致电气故障。抗振动和冲击:船舶在航行过程中会产生持续的振动,并且可能受到风浪冲击。船用组合起动器的结构设计更加坚固,内部元件经过加固和减震处理,能够在船舶的振动和冲击环境下正常工作,保障电动机控制的可靠性。安全性要求高防火防爆:船舶上存在燃油、润滑油等易燃物质,船用组合起动器需要满足防火防爆要求。其外壳和内部元件的设计和选材都考虑到了防止火花产生和防止火焰蔓延的因素,以确保在船舶上使用的安全性。绝缘性能:良好的绝缘性能对于船用组合起动器至关重要。由于船舶环境潮湿且可能存在导电物质,起动器的绝缘电阻必须足够高,并且要定期进行绝缘检测,防止因绝缘失效引发电气事故。符合船级社规范船用组合起动器必须通过船级社(如中国船级社 CCS、美国船级社 ABS、挪威船级社 DNV 等)的认证。
自动操舵仪的优点:
精确导航
引入多种导航信号:自动操舵仪可将电罗经、磁罗经、GPS 信号引入,实现对船舶的自动驾驶。这些精确的导航信号可以确保船舶沿着预定航线行驶,减少航线偏差,提高航行的准确性。例如,在远洋航行中,GPS 信号能够提供精确的位置信息,使船舶准确地驶向目的地港口,避免因人为判断失误导致的航线偏离。保持稳定航向:自动操舵仪能够根据设定的航向持续稳定地控制船舶的行驶方向,不受风浪、水流等外界因素的干扰。这对于需要长时间保持固定航向的航行任务尤为重要,如跨洋运输等。
操作模式多样
多种操舵方式:具有自动操舵、随动操舵、手动操舵和应急电源操舵四种操舵方式。在正常航行时,可以使用自动操舵模式,减少船员的劳动强度;在需要精确操作的情况下,如进出港口时,可以切换到手动操舵模式;随动操舵模式则适用于需要根据船舶动态实时调整舵角的情况;应急电源操舵模式确保在主电源故障时,仍能对船舶进行操舵控制,保障船舶的安全。
功能集成度高
集成油裂机组控制功能:自动操舵仪具有两台油裂机组的起动和停止功能。这种集成功能减少了船舶设备的复杂性,便于船员集中操作和管理,提高了船舶机舱设备的协同工作效率。 无锡宏智铭科技是一家专业提供钢衬塑船用配电设备的公司。
自动操舵仪的重要操作原理是基于反馈控制理论。其主要目的是通过不断监测船舶的实际航向,并与设定的目标航向进行比较,然后根据偏差来调整舵角,使船舶保持在预定航向上。
主要组成部分及其原理
传感器
电罗经和磁罗经:电罗经和磁罗经用于测量船舶的实际航向。电罗经通过测量地球自转角速度和重力加速度来确定船舶的真方位,精度较高;磁罗经则是利用地球磁场来指示方向。这些罗经所测得的航向数据会被传送给自动操舵仪的控制单元。GPS(全球定位系统):GPS用于确定船舶的地理位置。通过连续获取船舶的位置信息,自动操舵仪可以计算出船舶的实际航向,并与目标航向进行对比。GPS信号提供了较为精确的位置和速度信息,有助于提高自动操舵的精度。
控制单元:信号处理与比较、舵角计算
执行机构
舵机系统:计算得出的舵角指令会被传送给舵机系统。舵机系统根据指令驱动舵叶转动相应的角度。例如,如果船舶的实际航向偏左,控制单元计算出需要向右转动一定角度的舵角,舵机系统就会将舵叶向右转动,使船舶向右转向,从而纠正航向偏差。 无锡宏智铭科技是一家专业提供船用配电设备服务的公司,欢迎新老客户来电!湖北船用配电系统
无锡宏智铭科技是一家专业提供船用配电设备服务的公司,欢迎您的来电!湖北船用配电系统
船用配电系统的运行与管理
日常运行监控
船员需对配电系统进行日常监控,观察电压表、电流表等仪表读数,检查设备运行状态,及时发现异常情况。例如,通过观察发电机输出电压和电流,判断发电机是否正常运行。
维护保养
定期对配电系统进行维护保养,包括清洁配电设备、检查电缆和连接部位、测试保护装置功能等。例如,每月对配电箱内部进行清洁,每季度测试一次过载保护装置功能。
故障处理
当配电系统出现故障时,要迅速准确地进行故障诊断和处理。维修人员需熟悉系统原理和设备结构,借助测试工具查找故障点并及时修复。例如,当某区域停电时,通过检查分配电板的开关和熔断器,判断故障原因并排除。 湖北船用配电系统
自动操舵仪的重要操作原理是基于反馈控制理论。其主要目的是通过不断监测船舶的实际航向,并与设定的目标航向进行比较,然后根据偏差来调整舵角,使船舶保持在预定航向上。 主要组成部分及其原理 传感器 电罗经和磁罗经:电罗经和磁罗经用于测量船舶的实际航向。电罗经通过测量地球自转角速度和重力加速度来确定船舶的真方位,精度较高;磁罗经则是利用地球磁场来指示方向。这些罗经所测得的航向数据会被传送给自动操舵仪的控制单元。GPS(全球定位系统):GPS用于确定船舶的地理位置。通过连续获取船舶的位置信息,自动操舵仪可以计算出船舶的实际航向,并与目标航向进行对比。GPS信号提供了较为精确的位置和...
- 洛阳船用配电产品 2025-05-20
- 湖北船用配电系统 2025-05-19
- 防城港船用配电有哪些厂家 2025-05-17
- 温州船用配电控制台 2025-05-08
- 深圳船用配电配件 2025-04-19
- 重庆船用配电哪家好 2025-04-12
- 钦州船用配电控制系统 2025-04-01
- 常州船用配电解决方案 2025-01-25
- 连云港船用配电控制系统 2025-01-16
- 洛阳船用配电配件 2024-12-30






- 厦门气压传感器 05-28
- 南昌船用配电板 05-28
- 福州船用监测报警传感器 05-27
- 合肥RD80G05雷达物位计 05-26
- 扬州船用阀门遥控系统 05-26
- 丹东非船用传感器 05-24
- 江门船舶抗倾倒阀门遥控系统 05-23
- 苏州船用雷达物位计物位计定价 05-22
- 天津船用配电控制台 05-21
- 洛阳船用配电产品 05-20